The final design constrains gripper travel using a pair of bearing
4.7 (401) In stock

Download scientific diagram | The final design constrains gripper travel using a pair of bearing shafts. from publication: Axiomatic Design of a Linear Motion Robotic Claw with Interchangeable Grippers | Reykjavik University's electronic lab has a five-axis CRS Robotics A255 arm used in laboratory exercises that are in need of an improved claw. The current claw limits the robot arm operation duration and dexterity due to its bulk. In addition, the grippers don’t provide a | Axiomatic Design, Robotics and Physical Exercise | ResearchGate, the professional network for scientists.

Design and Application of High Resolution and Multiobject
Robotics, Free Full-Text
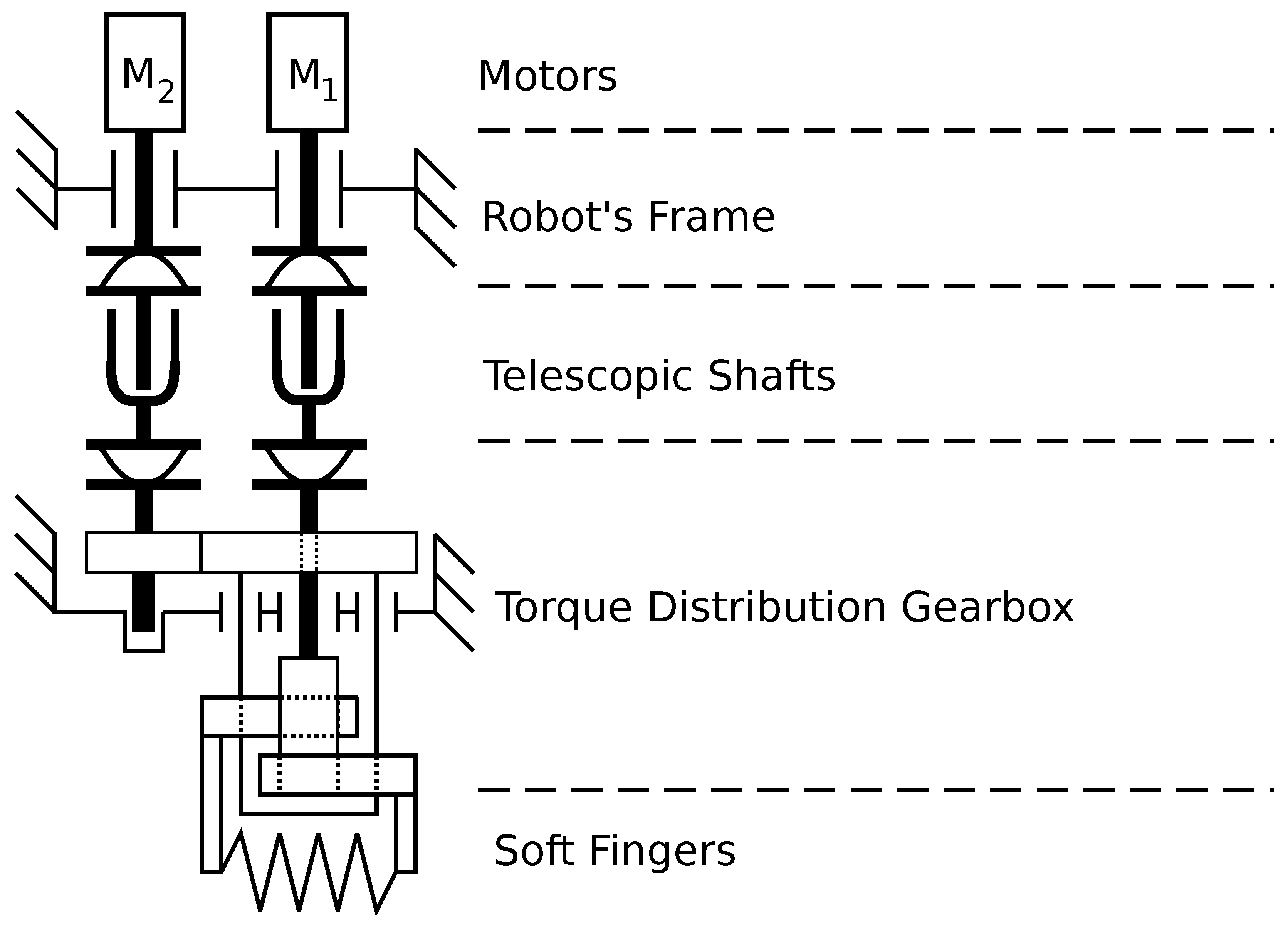
PDF) A Novel Variable Stiffness Compliant Robotic Gripper Based on Layer Jamming

Cosmoclench Gripper, PDF, Screw

Cosmoclench Gripper, PDF, Screw
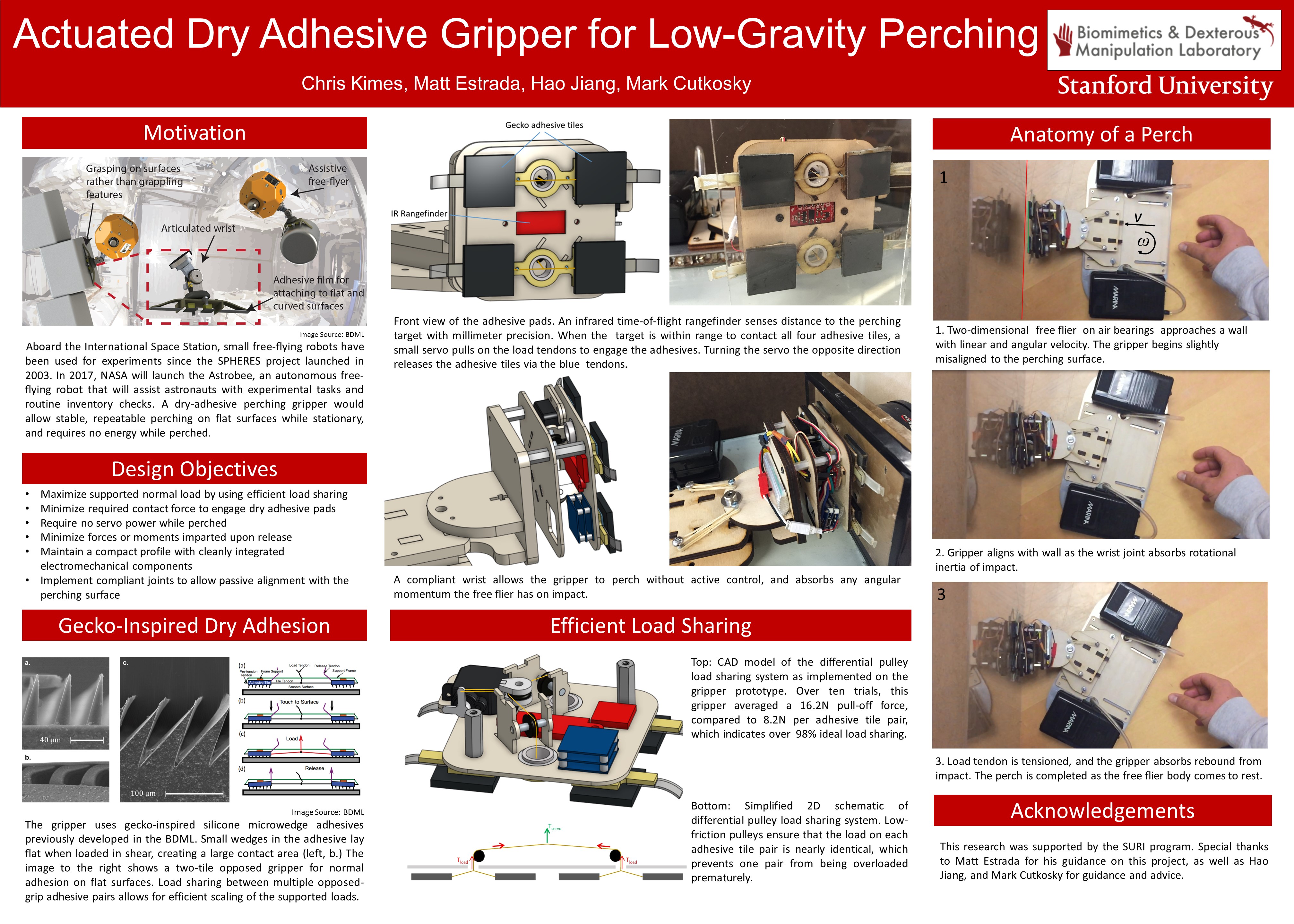
ChrisKimesSummerBlog Biomimetics and Dextrous Manipulation Lab

Compliant Manipulators

Cosmoclench Gripper, PDF, Screw

Kinematics analysis and trajectory planning of a continuum manipulator - ScienceDirect

Cosmoclench Gripper, PDF, Screw
Kilofly Non-Skid Soft Cotton Summer Slippers Gripper
Ralyn Shoe Grips - Heel Grippers 2 pairs - Shoe & Boot Accessories 4 U
GRIPZILLA Armwrestling Handle Cable Dumbell Attachment Grip Kit (PAIR)
 Satin Bridal Robe Wedding Trousseau Satin Sleepwear Wedding Robe
Satin Bridal Robe Wedding Trousseau Satin Sleepwear Wedding Robe Tips to Stand Out in a Competitive Job Market
Tips to Stand Out in a Competitive Job Market Brasil tem um dos melhores bolos do mundo - mas não é o que você está pensando
Brasil tem um dos melhores bolos do mundo - mas não é o que você está pensando ArtStation - F-11D Blaster Rifle and SE44 Blaster - Star Wars Bundle - Printable 3d models - STL files
ArtStation - F-11D Blaster Rifle and SE44 Blaster - Star Wars Bundle - Printable 3d models - STL files 91 Jeans n top styles ideas fashion, fashion outfits, casual outfits
91 Jeans n top styles ideas fashion, fashion outfits, casual outfits Levanta Cola Push Up Jeans Colombianos Levanta Cola Skinny Wide Waistband Denim
Levanta Cola Push Up Jeans Colombianos Levanta Cola Skinny Wide Waistband Denim